Ubuntu 20,04 기반 ROS2 Foxy 로 TurtleBot3 Waffle Pi 구동 과정 정리
OpenCR Setup
OpenCR firmware 업로드
- OpenCR을 라즈베리파이3에 micro USB케이블로 연결
dmesg tail 명령어를 통해 ttyACM0에 정상 연결 확인 - OpenCR firmware를 업로드 하기 위한 라즈베라피이 패키지 설치
ssh ubuntu@{IP_ADDRESS_OF_RASPBERRY_PI}
# ssh ubuntu@192.168.1.178
sudo dpkg --add-architecture armhf
sudo apt-get update
sudo apt-get install libc6:armhf
- OpenCR 환경 설정
export OPENCR_PORT=/dev/ttyACM0
export OPENCR_MODEL=waffle
rm -rf ./opencr_update.tar.bz2
- Firmware 와 Loader 다운로드 및 압축 해제
wget https://github.com/ROBOTIS-GIT/OpenCR-Binaries/raw/master/turtlebot3/ROS2/latest/opencr_update.tar.bz2
tar -xjf ./opencr_update.tar.bz2
- OpenCR로 Firmware 업로드
cd ~/opencr_update
./update.sh $OPENCR_PORT $OPENCR_MODEL.opencr
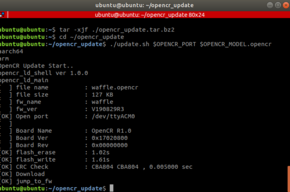
위와 같은 화면이면 업로드 성공(노래 소리가 나옴)
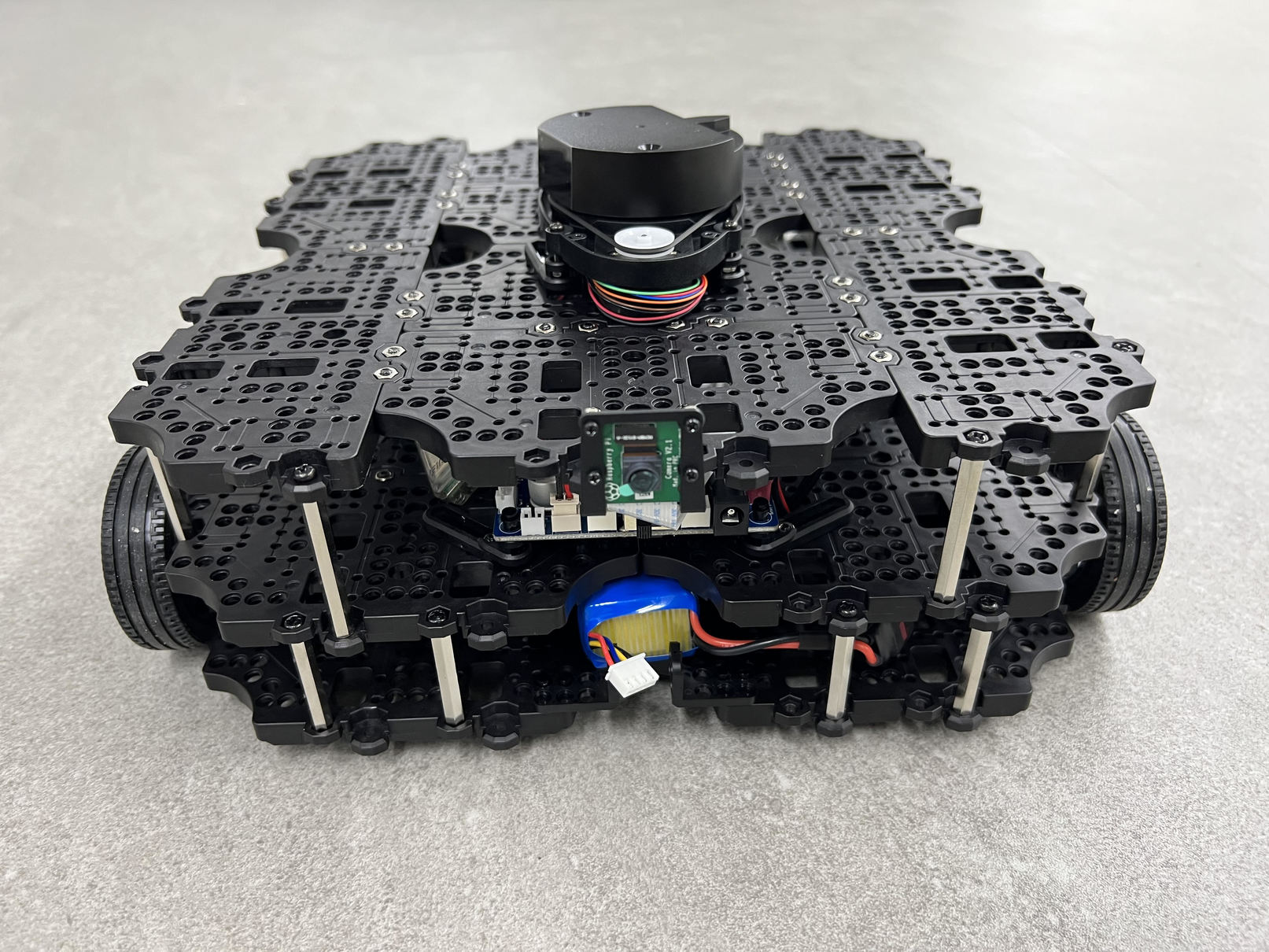
여기까지 설정 후 HW 조립
Bringup TurtleBot3
- TurtleBot3 APP 시작을 위한 Basic Packages 가져오기
- ssh 를 통해 쉘 접속 후 아래 명령어 실행
export TURTLEBOT3_MODEL=waffle_pi
ros2 launch turtlebot3_bringup robot.launch.py
- remote PC에서 키보드를 통한 제어 실행(Teleoperation)
export TURTLEBOT3_MODEL=waffle_pi
ros2 run turtlebot3_teleop teleop_keyboard
RemotePC의 키보드를 통한 원격 제어 해보기
w/x 는 속도 증감
a/d는 각도 증가 감소
s 는 멈춤