Ubuntu 20,04 기반 ROS2 Foxy 로 TurtleBot3 Waffle Pi 구동 과정 정리
Rpi Camera 셋팅하기
TurtleBot3 Rpi 카메라 사용을 위한 opencv 설치 및 카메라 테스트
Docker 실행
docker run --network=host --shm-size=512m tiryoh/ros2-desktop-vnc:foxy_turtlebot3_map
터틀봇 구동 및 ssh 접속
ssh ubuntu@{IP_ADDRESS_OF_RASPBERRY_PI}
# ssh ubuntu@192.168.1.177
OpenCV 설치 및 Foxy 의존성 패키지 설치
sudo apt install libopencv-dev python3-opencv
python3 -c "import cv2; print(cv2.__version__)" 로 확인
pkg-config --modversion opencv4
sudo apt install apt-file
sudo apt-file update
apt-file search opencv4.pc
sudo apt install ros-foxy-camera-calibration-parsers
sudo apt install ros-foxy-camera-info-manager
sudo apt install ros-foxy-launch-testing-ament-cmake
sudo apt install ros-foxy-image-pipeline
Opencv cam 빌드 및 설치
mkdir ~/opencv_cam_ws/src
cd ~/opencv_cam_ws/src
git clone https://github.com/clydemcqueen/opencv_cam.git
git clone https://github.com/ptrmu/ros2_shared.git
cd ~/opencv_cam_ws/
source /opt/ros/$ROS_DISTRO/setup.bash
colcon build --symlink-install
설치 완료 후
cd ~/opencv_cam_ws/install
source setup.bash
ros2 run opencv_cam opencv_cam_main --ros-args --param index:=0
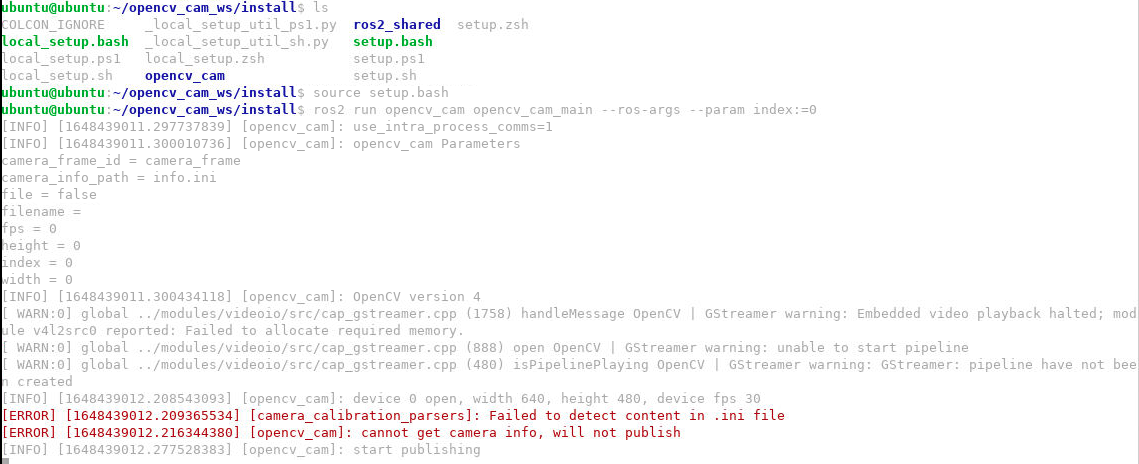
위와 같이 rpi camera 이미지가 publish 됨
이미지 publish 확인 및 테스트
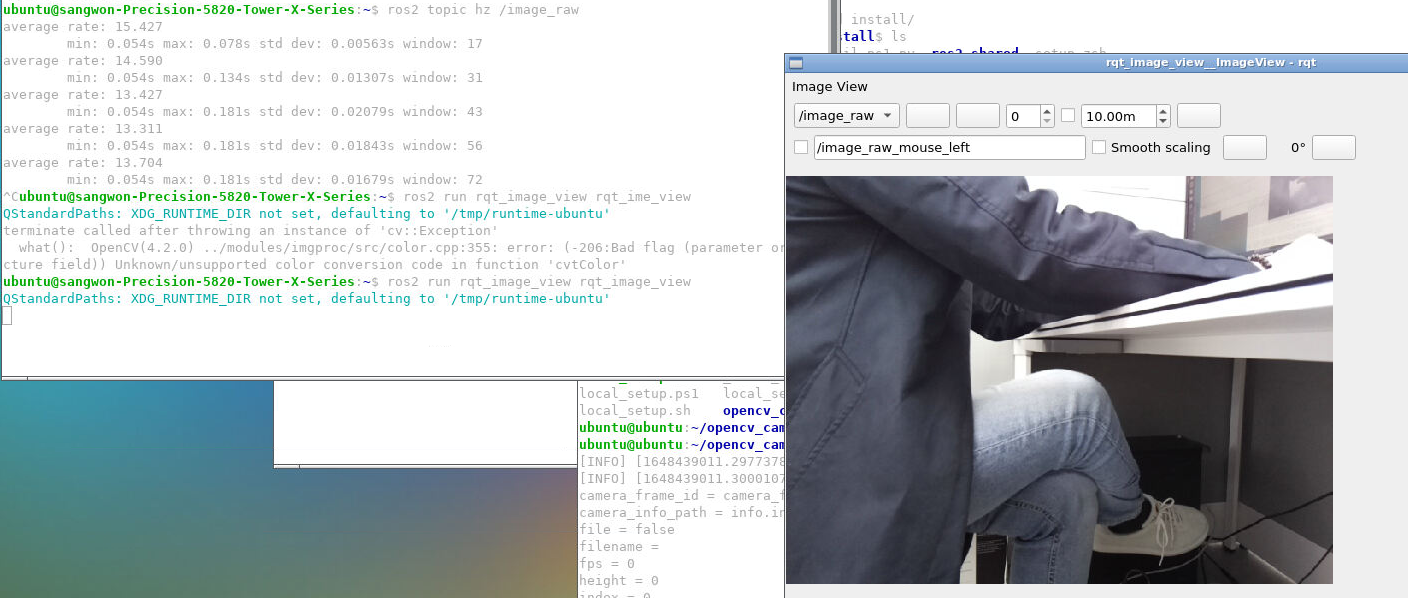
Host PC로 돌아와서 /image_raw 토픽으로 publish 되는 것 확인하기
ros2 topic hz /image_raw
ros2 run rqt_image_view rqt_image_view
창이 열린 후 topic을 /image_raw로 설정하면 TurtleBot3 라즈베리카메라 영상을 볼 수 있음
추후 해야할 일
Rviz에서 실행하기 위해 아래 두 에러를 해결해야함(카메라 캘리브레이션 필요)

Rviz에서 라이더와 함께 카메라 정보를 보고자 하면 카메라 캘리브레이션을 해야함
해당 과정을 하고 나면 이미지에 2d 라이더 정보를 뿌리는 증강 현실과 같은 효과도 줄 수 있음
https://www.youtube.com/watch?v=XRmdUfkIu08
참조 List
https://endland.medium.com/ros2-darknet-%EC%82%AC%EC%9A%A9%ED%95%98%EA%B8%B0-337ad8cd3d28
https://github.com/clydemcqueen/opencv_cam
https://jeffzzq.medium.com/ros2-image-pipeline-tutorial-3b18903e7329