Ubuntu 20,04 기반 ROS2 Foxy 로 TurtleBot3 Waffle Pi 구동 과정 정리
Navigation 구동
Run Navigation Node
ssh 로 접속하여 SBC에서 turtlebot3_bringup robot.launch 실행
ssh ubuntu@{IP_ADDRESS_OF_RASPBERRY_PI}
# ssh ubuntu@192.168.1.178
export TURTLEBOT3_MODEL=waffle_pi
ros2 launch turtlebot3_bringup robot.launch.py
Remote PC에서 Navigation 노드 실행
export TURTLEBOT3_MODEL=waffle_pi
ros2 launch turtlebot3_navigation2 navigation2.launch.py map:=$HOME/map.yaml
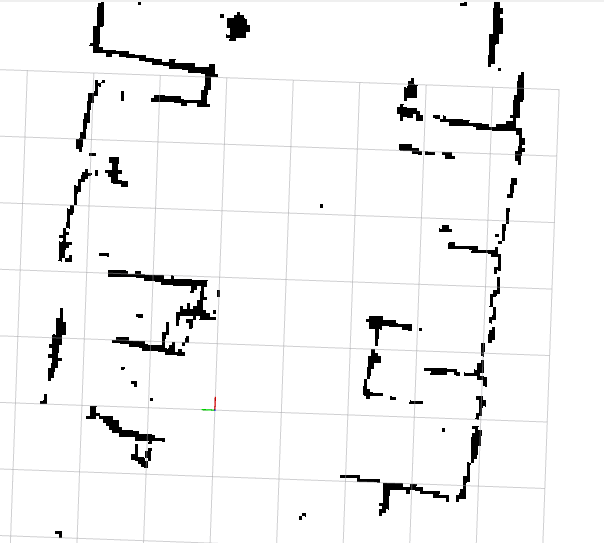
Rivz2에 SLAM에서 생성된 지도가 로드된 모습
Rviz2 메뉴의 2D Pose Estimate 클릭
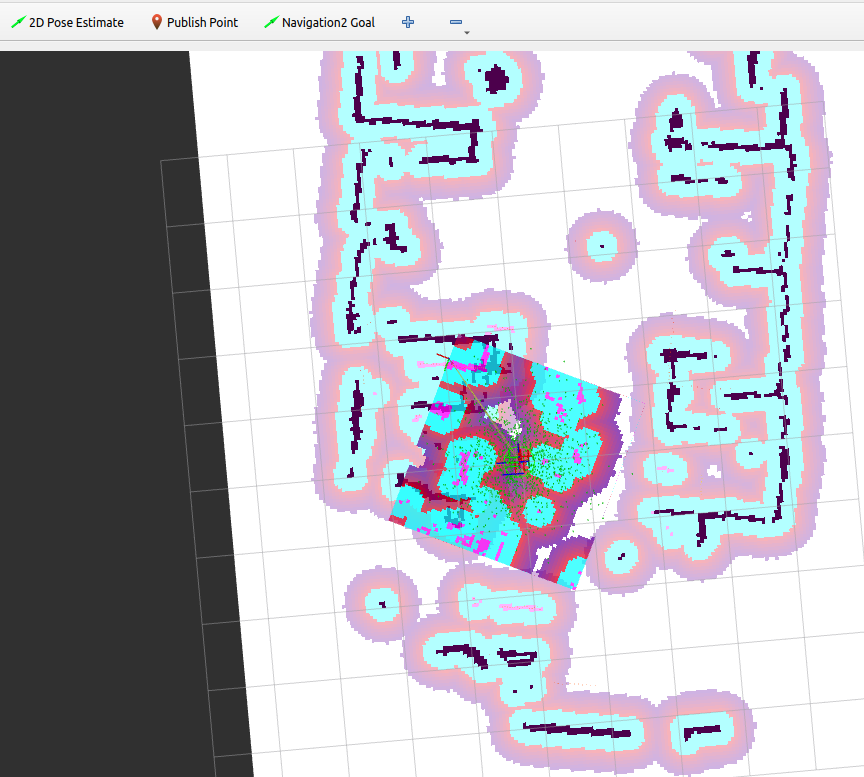
map에 시작점 정확히 위치하기위해 원격조정 실행
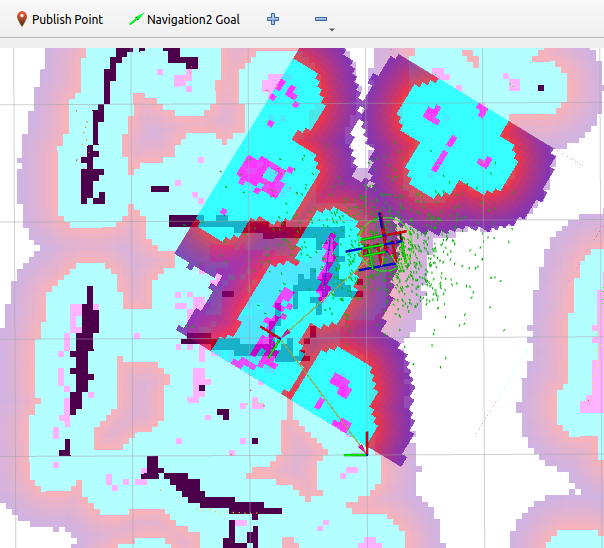
- 검은색 셀은 실제 장애물
- 하늘색 영역은 로봇 중심 위치가 이 영역으로 오면 충돌하게 되는 지점
- 굵은 빨간색 픽셀은 경계선을 표시
- 보라색(파란색)은 안전한 지역을 의미
ros2 run turtlebot3_teleop teleop_keyboard
이후 로봇을 돌리면 green arrows 들이 점점 촘촘해지면 종료
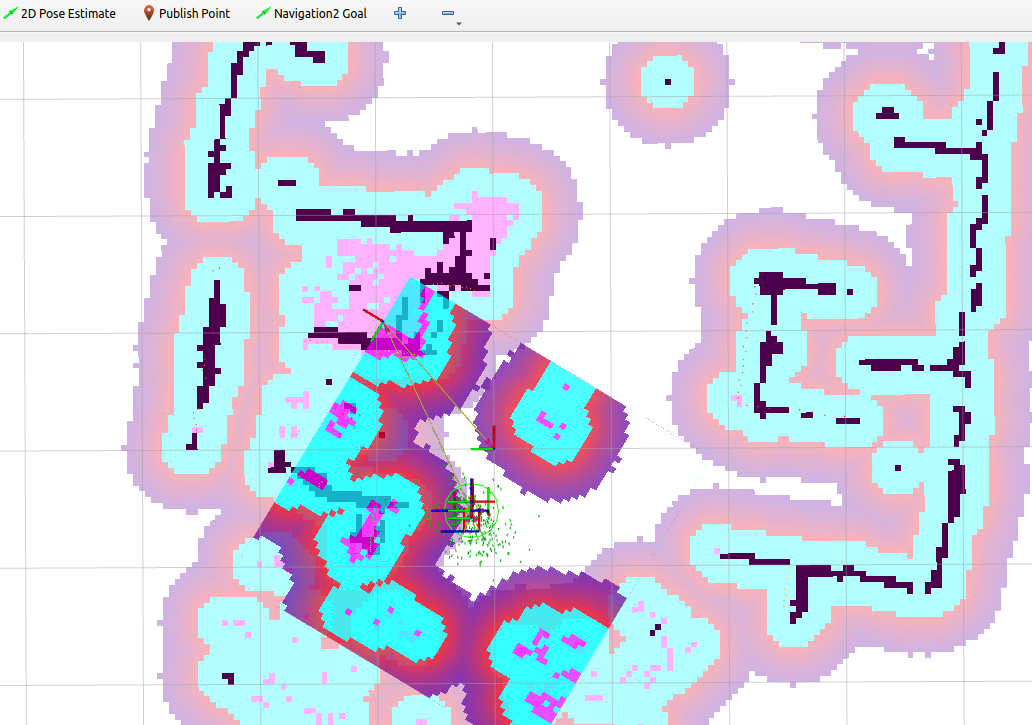
Navigation2 Goal 버튼을 클릭해 가고자하는 로봇 위치 지정
해당 위치로 이동하는 것 볼 수 있음