Ubuntu 20,04 기반 ROS2 Foxy 로 TurtleBot3 Waffle Pi 구동 과정 정리
Navigating While Mapping
SLAM 시 Nav2를 활용해 모든 동작을 수동 조작하지 않고 어느정도 반자동적으로 맵 생성할 수 있는지 구동함
Docker 실행
docker run --network=host --shm-size=512m tiryoh/ros2-desktop-vnc:foxy_turtlebot3
터틀봇 구동 및 bringup Node 실행
ssh ubuntu@{IP_ADDRESS_OF_RASPBERRY_PI}
# ssh ubuntu@192.168.1.177
export TURTLEBOT3_MODEL=waffle_pi
ros2 launch turtlebot3_bringup robot.launch.py
호스트 PC docker 에서 Nav2, SLAM 실행
export TURTLEBOT3_MODEL=waffle_pi
ros2 launch turtlebot3_navigation2 navigation2.launch.py
export TURTLEBOT3_MODEL=waffle_pi
ros2 launch turtlebot3_cartographer cartographer.launch.py
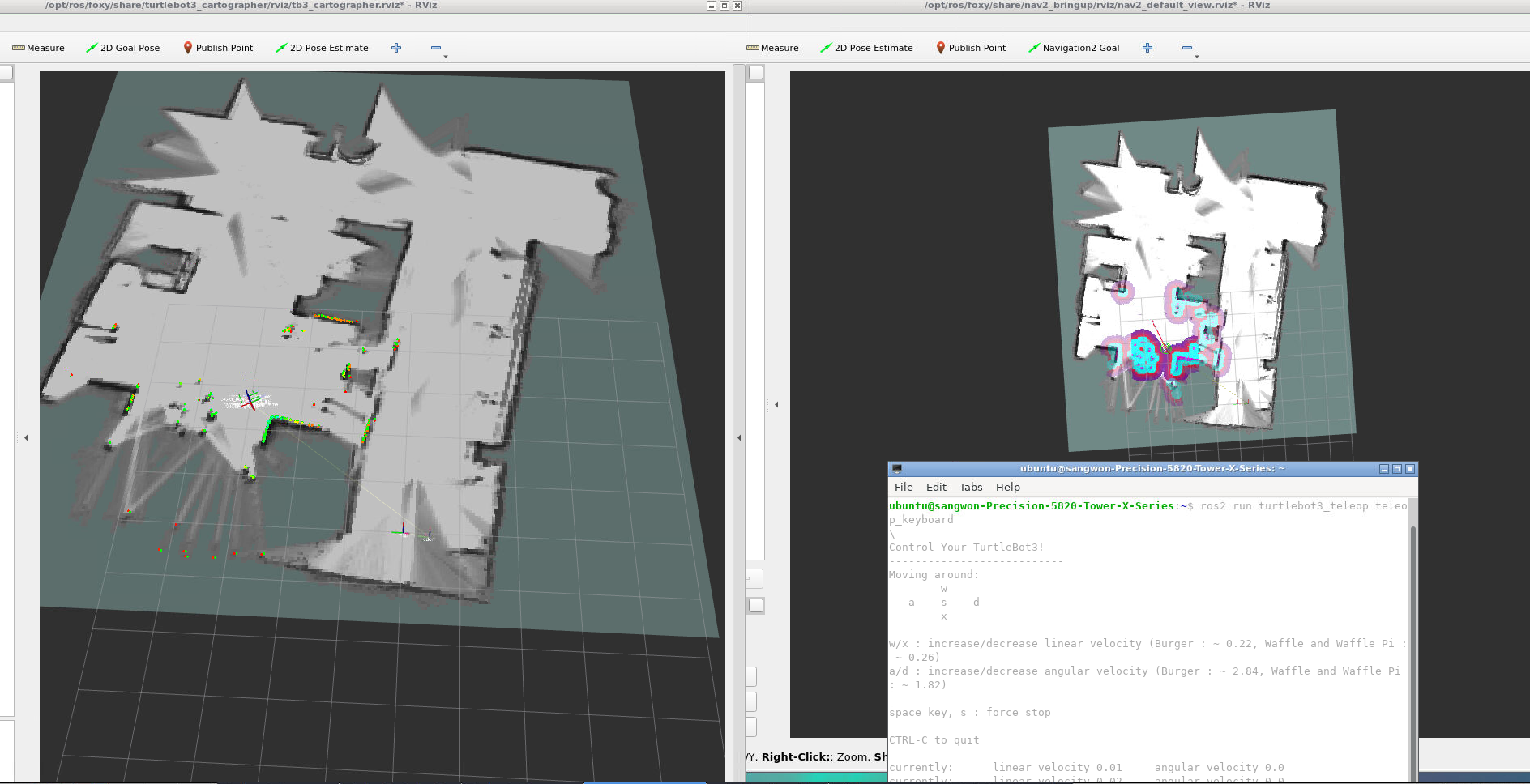
Nav2 기반으로 SLAM 실행 시 생각보다 자동 주행에 오차가 많이 발생 -> Inflation 영역이 겹쳐서 실제 주행이 안되어 멈춰있는 경우가 많음
Telops 실행을 통해 주행이 안될 시 수동조작으로 mapping
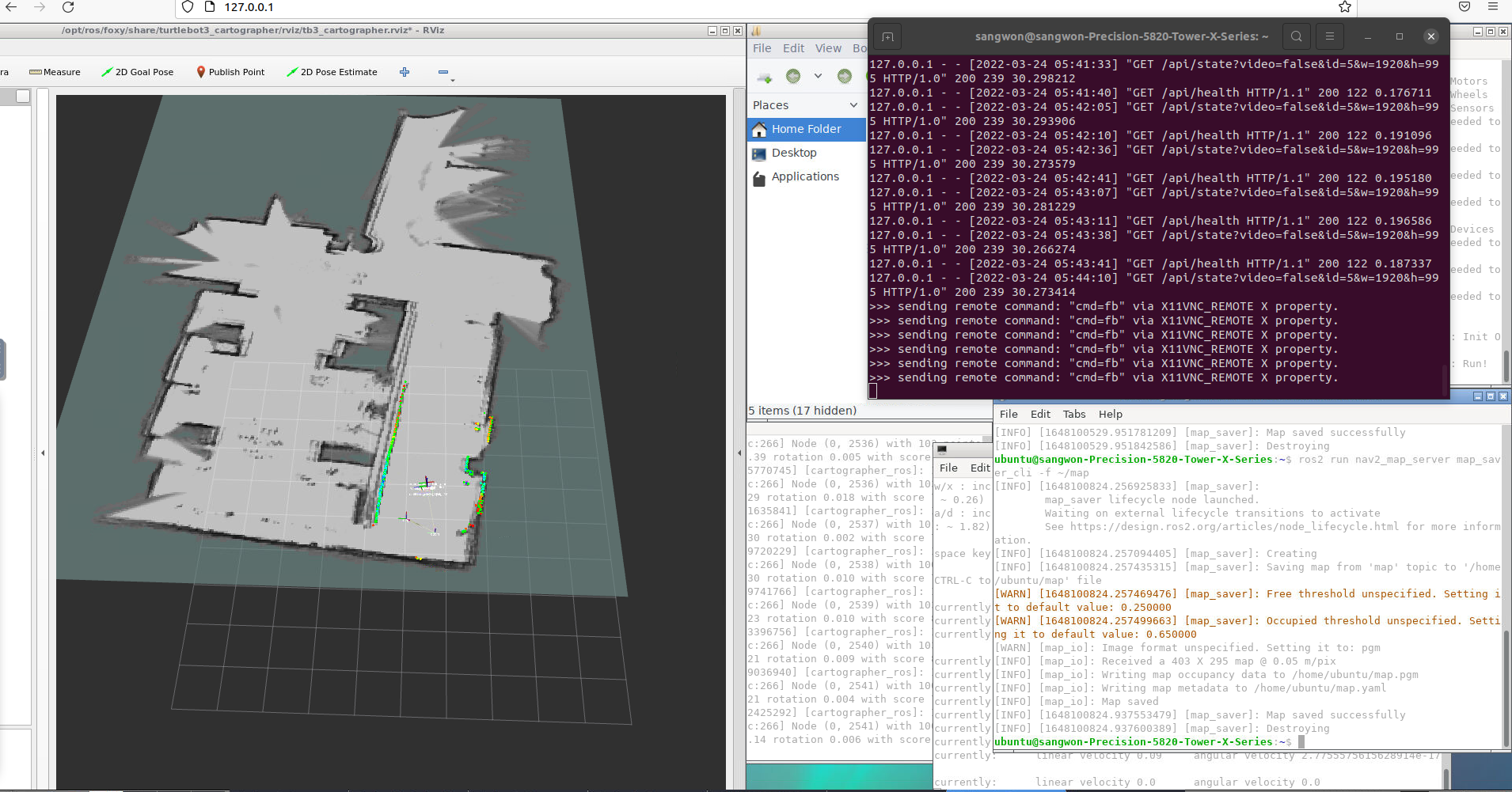
중간에 nav2 rviz가 꺼져버렸음…
export TURTLEBOT3_MODEL=waffle_pi
ros2 run turtlebot3_teleop teleop_keyboard
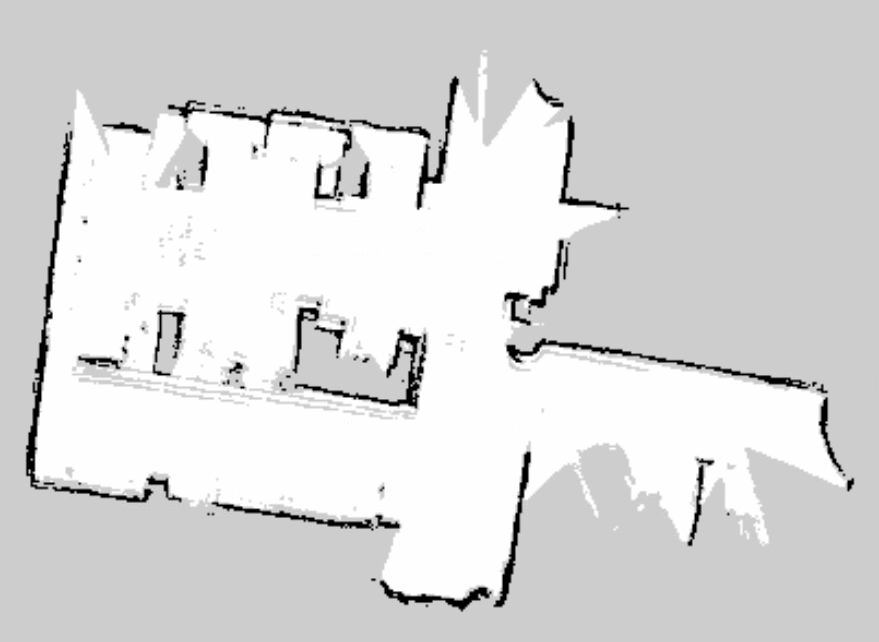
수동주행으로 Mapping 완료 후 지도 저장
최종 완료된 지도 모습