Ubuntu 20,04 기반 ROS2 Foxy 로 TurtleBot3 Waffle Pi 구동 과정 정리
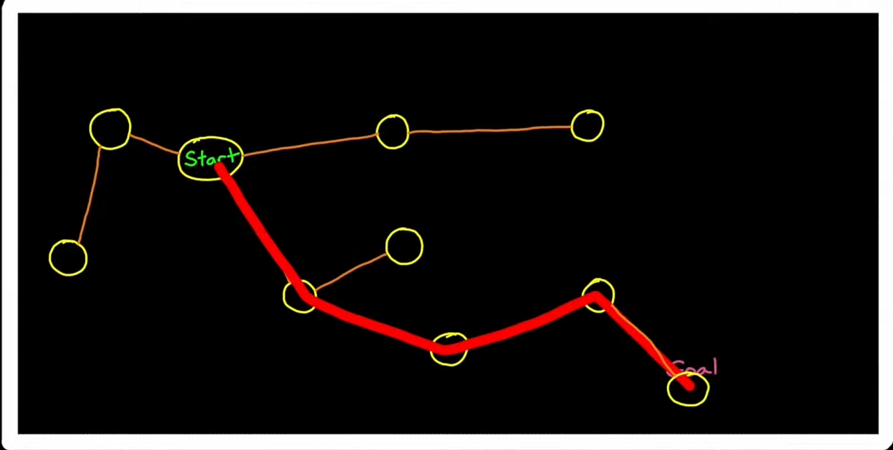
Path Planning
두 x,y 점 을 각각 start pose, goal pose 라 할 때 직선으로 그린 경로가 가장 최적의 경로일 것임
graph base 방식에 초점을 맞추어 설명
각각의 pose가 노드이며 edge로 경로의 cost가 있음
전체 그래프는 필요 없고 subset의 트리 형태로 구성됨
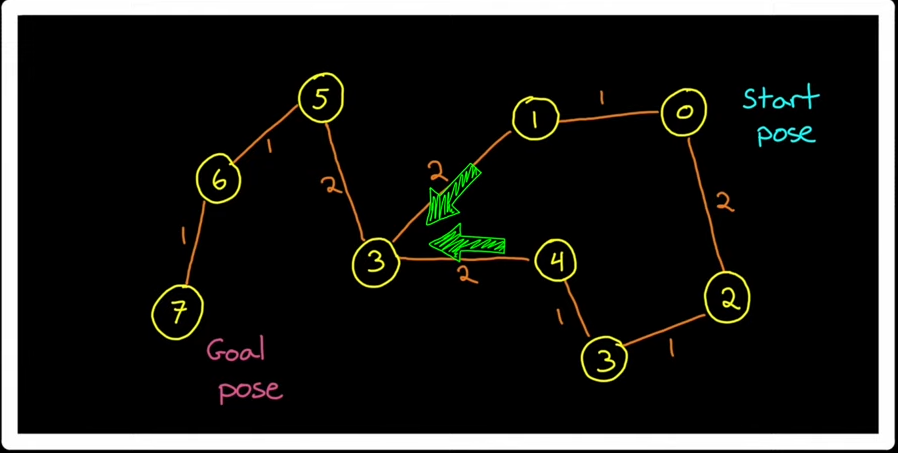
위에서 초록색 화살표는 더 cost 가 많으므로 지워짐
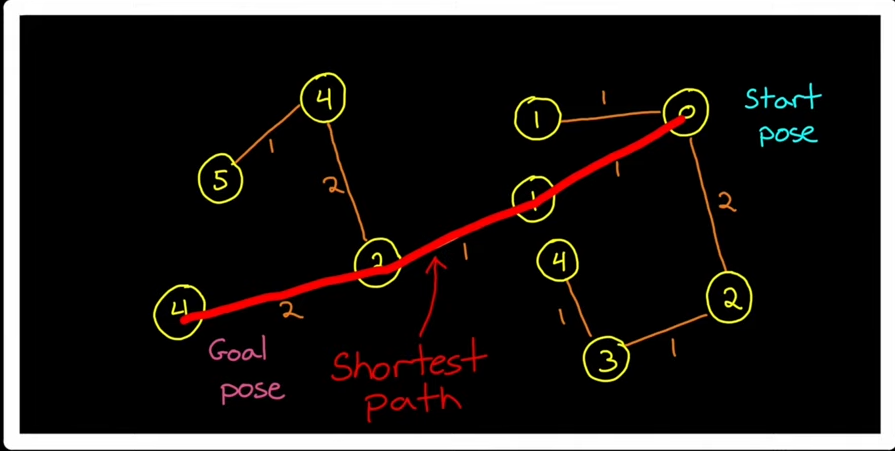
이런식으로 계속 cost 가 적은 goal pose 까지의 shortest path를 찾음
글로벌 최적화는 안되지만 로컬 최적화를 통해 최소 경로를 찾음
Search-based methods
각각 그리드 셀에 node 들이 있고 goal까지 최적 경로를 찾음
모든 셀을 다 검색(브루트포스)는 비용이 너무 큼 -> A* 알고리즘 사용
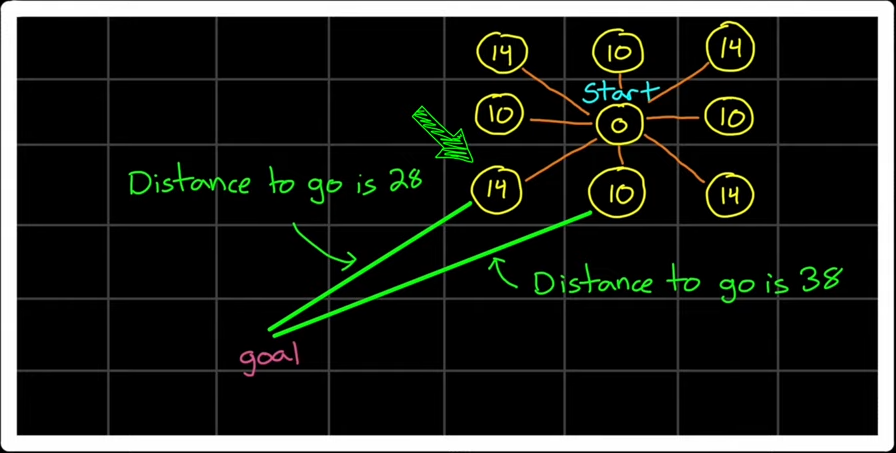
왼쪽경로는 42, 오른쪽은 48 따라서 14 노드를 선택하고 이후 각각 뻗어나가면서 최소 비용의 경로를 찾음
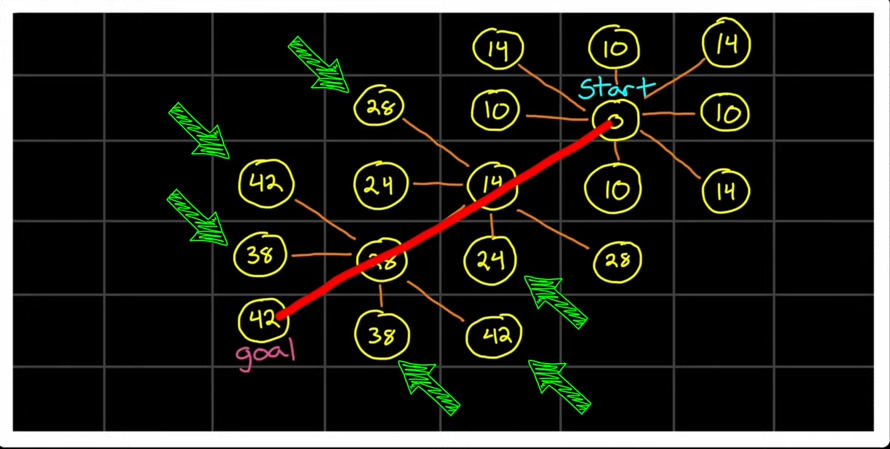
이렇게 줄여도 비용이 매우큼(grid가 클수록 매우 느림)
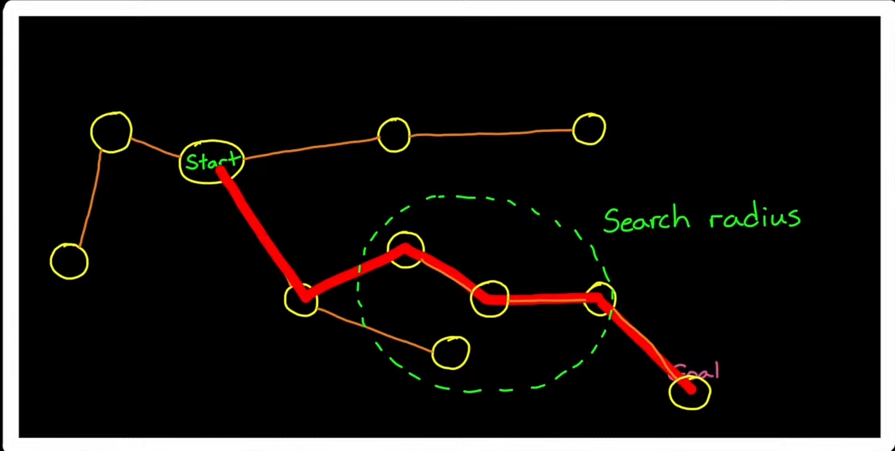
Sampling-based methods
맵이 복잡할 때 sampling-based methods를 이용
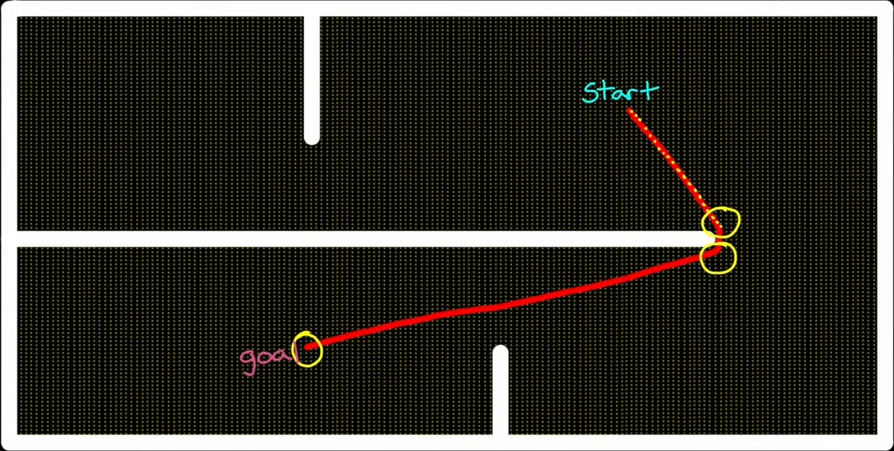
A*는 위와 같은 복잡한 맵에서 빨간색 선의 점선같이 인접한 노드들을 모두 보려고함
인접한 노드들을 모두 보지않고 조금 떨어진 노란색 원 안에만 봐서 goal까지 도달하는 것이 목적
이 sparse한 노드를 어떻게 선택해서 goal로 갈것인지?
ramdom하게 sampling해서 가봄 -> RRT(Rapidly Exploring Ramdom Trees), 여기서 최적화 된 솔루션인 RRT*
- Basic RRT Algorithm
- random한 노드를 선택하고 이전 pose 와 random한 포즈간에 가까운 node를 선택해 이어줌
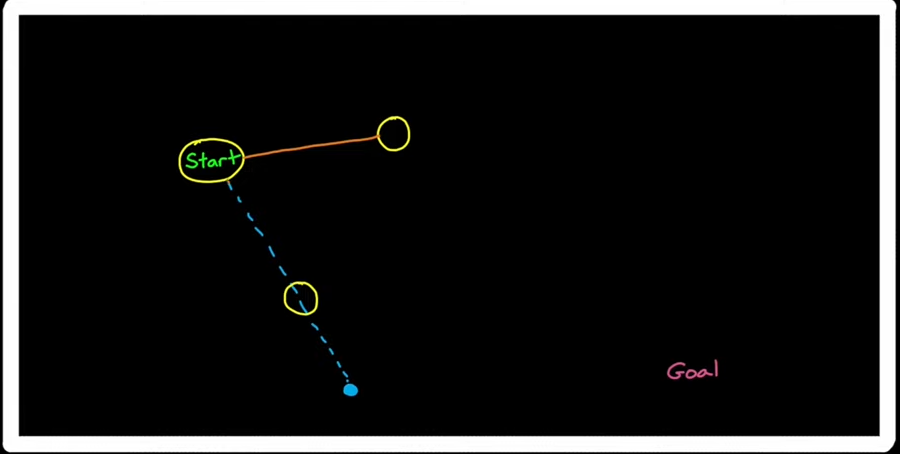
- 계속 랜덤한 노드를 선택하고 가까운 노드를 활성화 시켜 결국에는 goal로 가는 경로를 찾음
- A*보다 fewer 한 노드들만 봄
- 완전 shortest 경로를 찾지를 못하지만 빠르게 goal까지의 경로를 찾을 수 있음
- RRT* Algorithm
- random한 노드를 선택해 인접한 노드를 선택하는 것은 RRT와 동일하지만 Search radius를 통해 중간에 최소화된 경로를 찾음
- 이전에 RRT에서 발견한 경로 말고 도 적은 비용의 경로를 찾을 수 있음