Ubuntu 20,04 기반 ROS2 Foxy 로 TurtleBot3 Waffle Pi 구동 과정 정리
SLAM 구동
Run SLAM Node
ssh 로 접속하여 SBC에서 turtlebot3_bringup robot.launch 실행
ssh ubuntu@{IP_ADDRESS_OF_RASPBERRY_PI}
# ssh ubuntu@192.168.1.178
export TURTLEBOT3_MODEL=waffle_pi
ros2 launch turtlebot3_bringup robot.launch.py
Remote PC에서 SLAM 노드 실행
export TURTLEBOT3_MODEL=waffle_pi
ros2 launch turtlebot3_cartographer cartographer.launch.py
처음에 값이 안받아질 수 있는데 센서 값이 잘오는지 확인해봐야함
ros2 topic list -t
ros2 topic echo /scan
/scan 토픽에 대해 값이 잘 오는지 확인해보기
원격조정으로 맵 그린 후
export TURTLEBOT3_MODEL=waffle_pi
ros2 run turtlebot3_teleop teleop_keyboard
맵 저장
ros2 run nav2_map_server map_saver_cli -f ~/map
맵 파일(default로 /home/${username} 에 map.pgm, map.yaml 파일이 저장됨)
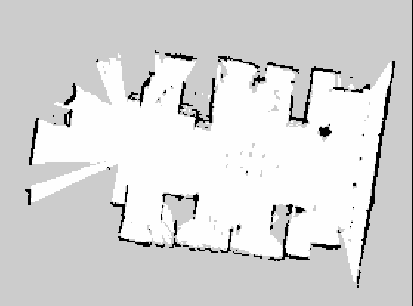
맵 지도 결과