Ubuntu 20,04 기반 ROS2 Foxy 로 TurtleBot3 Waffle Pi 구동 과정 정리
Cartographer PoseGraphOptimization
Pose Graph Optimization
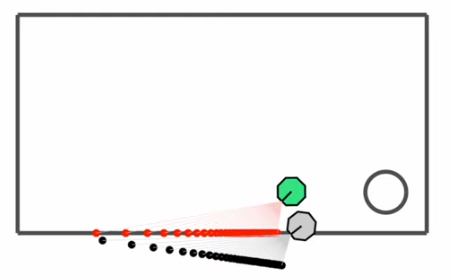
로봇이 라이더로 처음 측정하면 이를 Pose 그래프(오른쪽)로 옮김

로봇이 조금 움직이면 실제 Pose와 Noise로 인한 오차로 Estimated 로봇 Pose가 있음
Estimated 로봇 Pose를 Pose Graph로 다시 옮김


맵에서 어딘지는 몰라도 두 Pose간에 얼마만큼 떨어졌는지는 알 수 있음
두 Pose 간에 Edge 로 이어줌 두번째 측정된 포즈의 위치에 따라 라이더로 관측된 것을 조정할 수 있음
(앞 뒤나 회전 시 관측 값들이 이동가능)
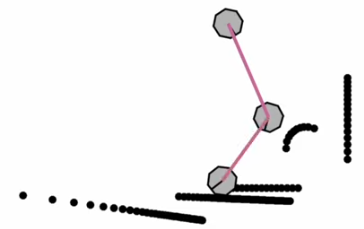
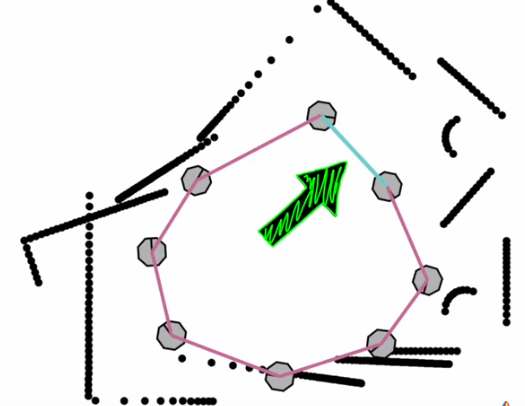
계속 로봇이 가면 다시 측정된 것을 Pose Graph로 옮기고 Edge로 이어줌
이제 3개의 노드와 2개의 edge로 구성된 그래프가 완성됨
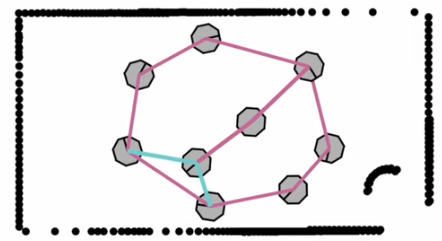
이후 로봇이 한 바퀴 돌았다고 가정하면 아래와 같은 Pose Graph가 생성됨
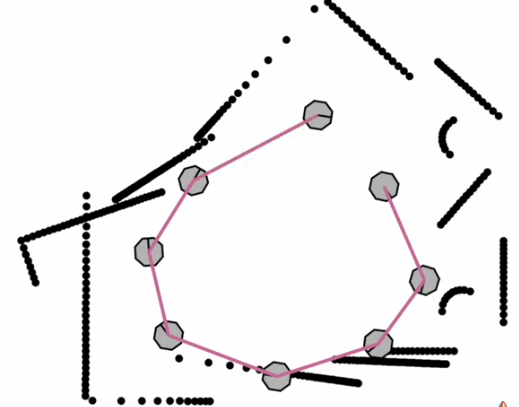
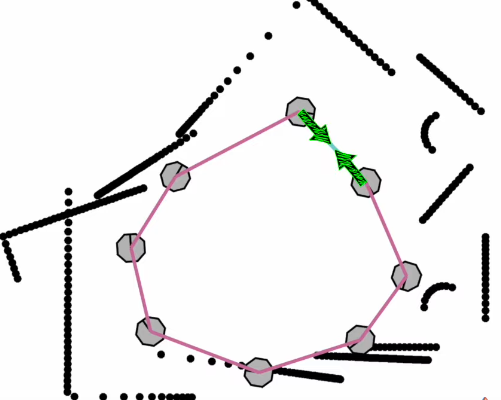
여기서 마지막 Pose(Current Pose)와 처음 Pose 를 보면 같은 Feature의 환경 값을 가지고 있음
이 두 Pose를 연결하면 Close Loop를 만듬
여기서 Loop Closure가 생기며 해당 Edge(파란색)는 Tension을 가지고 있음
두 Pose에서 측정된 Feature 들이 얼마나 가까운지 확인 하며 그림에서는 거의 똑같기 때문에 두 Pose 간 당겨서 일치 시키고 싶어함(파란 Edge 부분)
해당 Pose 들이 당겨지면서 최적화하는 과정이 진행되게 됨(현재까지 진행된 전체 포즈들의 에러가 나이스하게 줄어듬)
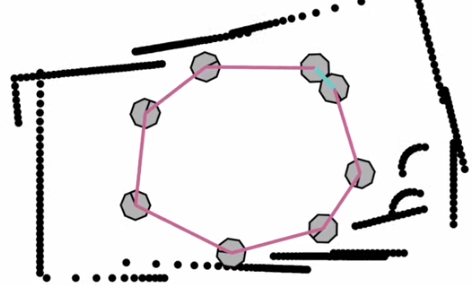
왼쪽 위의 선들이 연결되어 있지 않고 아직 부정확하지만 로봇이 움직이면서 점점 최적화 과정을 거쳐 맵을 만들게 됨
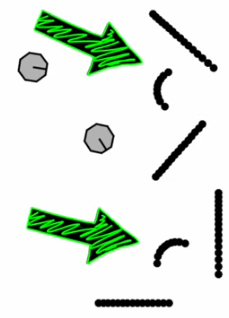
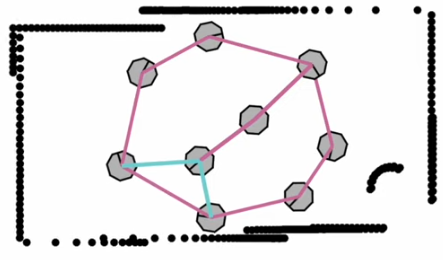
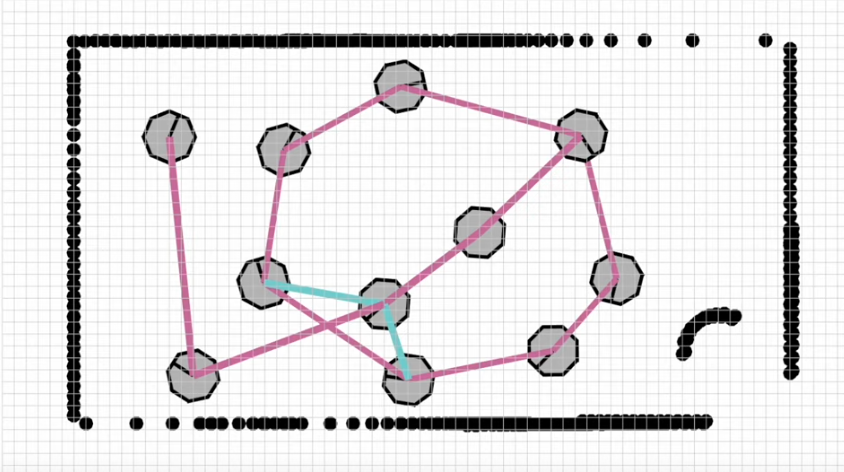
다시 아래와 같은 Loop Closure가 발생했다고 하면 점차 당겨 에러를 최소화 함
이렇게 만든 Pose Graph를 맵으로 어떻게 만들 것 인가?
간단하게 Binary Occupancy Grid(격자맵)
Grid 셀에 집어 넣어 장애물이 있는 것은 1 아닌 것은 0로 채우는 과정
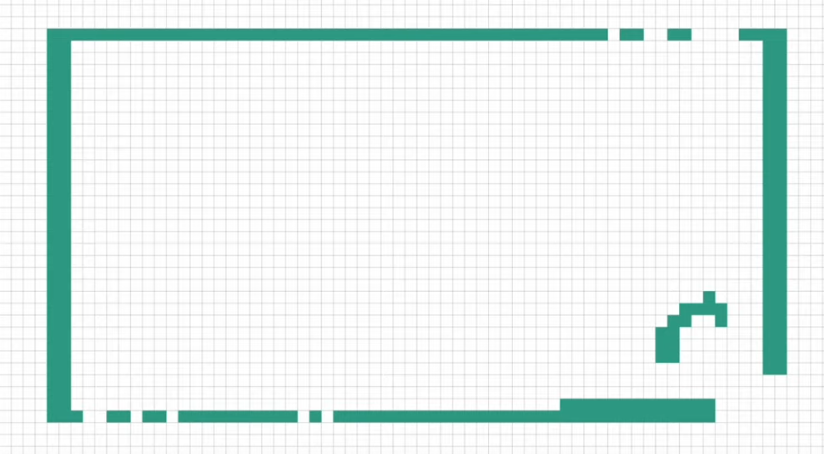
중간중간 hole이 있지만 전체적으로 보기 좋음
Probabilistic Occupancy Grid는 중간 중간 hole을 확률적으로 채워 더 확률적으로 정확한 맵을 생성할 수 있음